
Over the past decades, roboticists have introduced a wide range of systems that can move in various complex environments, including different terrains, on the ground, in the air, and even in water. To safely navigate real-world dynamic environments without colliding with humans or nearby objects, most robots rely on sensors and cameras.
Researchers at Tsinghua University have recently developed WHERE-Bot, a new wheel-less, everting soft robot (i.e., a flexible robot that moves by turning its body structure inside out) that safely moves in unstructured environments without using sensors to detect obstacles. This robot, introduced in a paper published on the arXiv preprint server and set to be presented at the 8th IEEE International Conference on Soft Robotics (RoboSoft) in April, leverages its unique helical ring-based structure to move in all directions.
“One day, while playing with a Slinky toy during a lab meeting,” Shuguang Li, senior author of the paper, told Tech Xplore. “Suddenly, a new idea struck us: what if we connected the head and tail of the spring toy? By joining its two ends, the spring could be endlessly turned inside-out—a motion we now call ‘everting’—presenting a fascinating color flow. This sparked our curiosity about how such a helical ring—perhaps with some structure modifications—would behave in various environments: on the ground, along a pipe, underwater, on sand, and even in the air.”
Li and his colleagues first set out to study the basic structural and kinetic properties of helical rings, circular structures with a spiral-like shape, while also trying to understand how they move on the ground. This ultimately led them to develop WHERE-Bot, a helical ring-based robot that can turn itself inside out, moving in surprising ways.
“At first glance, you don’t know where the robot will go,” explained Siyuan Feng, lead author of the paper. “If you pick it up, you can only see a motor rotating the helical ring along the hub’s circumference. However, when the ring touches the ground, the robot’s unbalanced mass distribution induces asymmetric friction distribution, driving the robot to self-rotate and move toward the heavier side. That results in an orbiting behavior along a circular path.”
A unique characteristic of WHERE-Bot is that its omnidirectional locomotion capabilities are inherent to its mechanical structures. As a result, it can reliably navigate unpredictable environments, without relying on sensors to detect nearby objects and plan future movements.
“We successfully transformed a simple spring toy into a mobile robot with exceptional kinematic properties,” said Li. “Much like a quick-thinking reptile, when the robot encounters an obstacle, its spring everts to help it retreat, ensuring safe and reliable movement without getting stuck. This ingenious behavior not only allows it to explore the boundaries of unknown terrains but also opens exciting practical applications.”
-
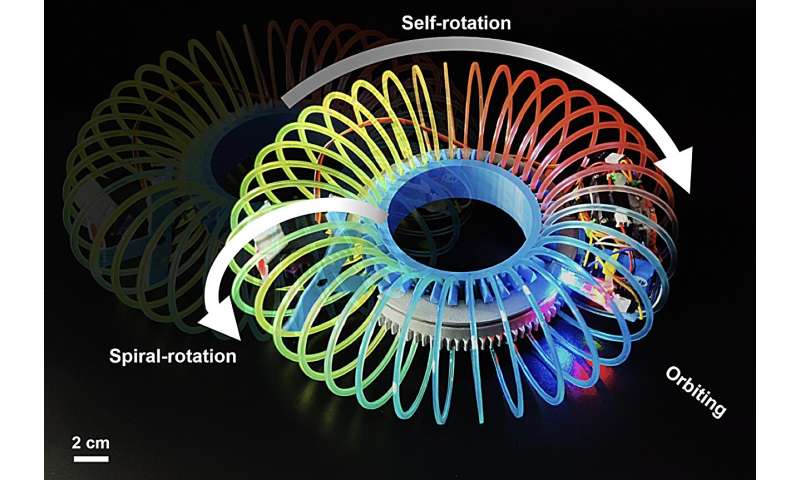
The WHERE-Bot’s motion consists of a spiral-rotation (everting) along the hub circumference, a self-rotation around the hub’s center, and an orbiting around a certain point. Credit: Feng et al.
-
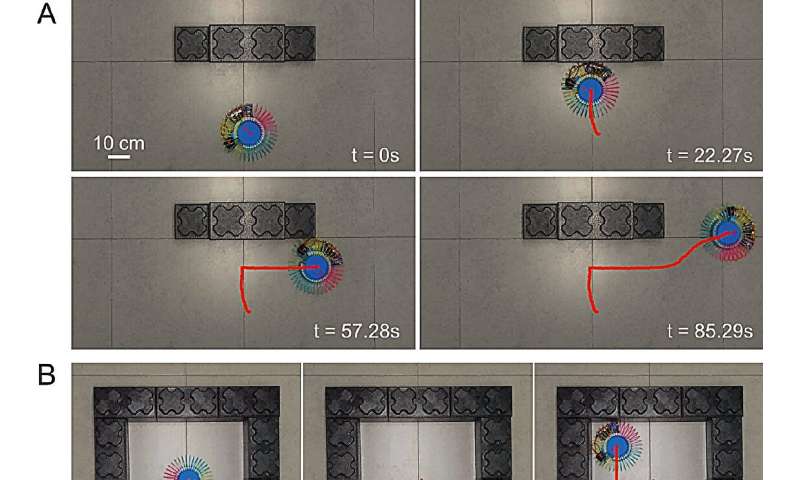
Environment exploration and interaction without sensor and trajectory control. (A) Automated obstacle avoidance behavior. (B) Exploratory behavior within a 60 𝑐 𝑚 × 60 𝑐 𝑚 square boundary of the environment. Credit: arXiv (2025). DOI: 10.48550/arxiv.2503.07245
The new robot developed by Li and his colleagues could soon be further improved to broaden its capabilities and enable it to move in a wider range of environments. In the future, it could have a wide range of applications. For instance, helping users remotely infer the shape of caves or other underground environments, excavating sand-based terrain to uncover hidden structures, inspecting pipes and even designing new omnidirectional bumper cars or other recreational robotic systems.
“In our future research, we plan to focus on enhancing both the robustness and versatility of WHERE-Bot,” added Dengfeng Yan, one of the paper’s co-authors. “Currently, its spring is made from plastic, which is prone to breaking under significant deformation. We intend to explore stronger materials to construct a more durable version capable of handling complex terrains.
“Furthermore, we plan to refine the robot’s design by integrating functional elements—such as high-friction skins, propellers, and barbs—to further investigate and expand its motion capabilities in a variety of environments, including on the ground, along a pipe, underwater, on sand, and even in the air.”
More information:
Siyuan Feng et al, WHERE-Bot: a Wheel-less Helical-ring Everting Robot Capable of Omnidirectional Locomotion, arXiv (2025). DOI: 10.48550/arxiv.2503.07245
© 2025 Science X Network
Citation:
Wheel-less helical ring-based soft robot can move reliably in all directions (2025, March 27)
retrieved 27 March 2025
from https://techxplore.com/news/2025-03-wheel-helical-based-soft-robot.html
This document is subject to copyright. Apart from any fair dealing for the purpose of private study or research, no
part may be reproduced without the written permission. The content is provided for information purposes only.
